汽车视觉 Automotive Vision - Behavior Recognition 行为识别
Chapter 8: Behavior Recognition 行为识别 今天我们讨论行为识别这一章节。 这是这一章节的参考文献列表,我们主要涉及隐马尔可夫模型,因此主要参考文献是关于隐马尔可夫模型及其在各种应用中的使用方法的教材。您可以考虑阅读Witten和Frank关于人工智能的书籍,其中包含 …
Chapter 8: Behavior Recognition 行为识别 今天我们讨论行为识别这一章节。 这是这一章节的参考文献列表,我们主要涉及隐马尔可夫模型,因此主要参考文献是关于隐马尔可夫模型及其在各种应用中的使用方法的教材。您可以考虑阅读Witten和Frank关于人工智能的书籍,其中包含 …
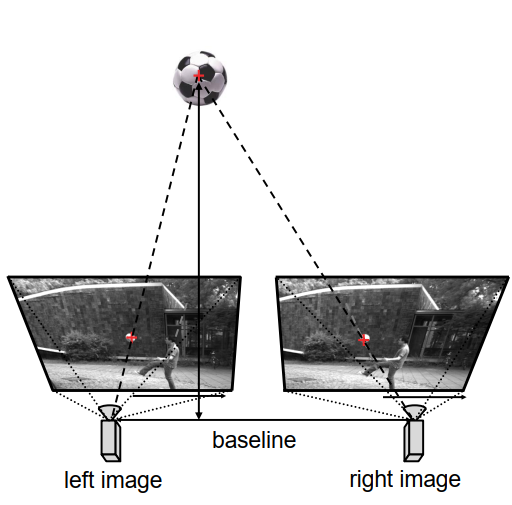
chapter 2 Binocular Vision 双目视觉 欢迎来到《汽车视觉》第二章,今天我们将讨论双目视觉系统,也称为立体视觉。这是一些提供有关双目视觉系统章节的教科书列表。如果你需要超出本讲座范围的背景信息,请参考这些书籍以获取更多信息。让我们通过介绍对极几何概念来开始我们对双目视觉的讨 …
Chapter 4: Optical Flow and Image Based Tracking 光流和基于图像的跟踪 欢迎来到《汽车视觉》讲座中关于光流和基于图像的跟踪的章节。 首先,让我们看一下文献。这里有几篇来自教科书和原创论文的章节,涉及到今天讨论的主题。前三个条目是教科书的一部分,介绍了 …
Chapter 7: Road Recognition 道路识别 欢迎回到汽车视觉课程,今天我们将讨论第七章,即从相机图像识别道路。 以下是与本章工作相关的参考文献列表。第一篇论文是关于基于视频识别车道标记和估计车道几何形状的较早的工作。第二篇论文也涉及相同的主题,来自同一时期。第三篇论文是 …
Chapter 6: Self-Localization and Mapping 欢迎回到汽车视觉的第六章,我们将讨论以相机为基础的自我定位和映射的主题。 自我定位和映射的主题是机器人技术和制图和地理信息学领域进行大量研究的领域。例如,在Tune Burger和Fox的《概率机器人》一书中,第七到 …
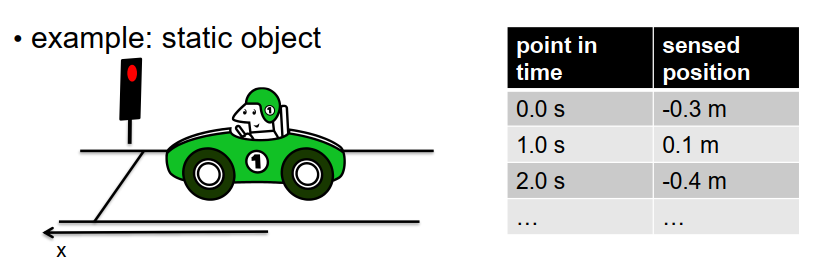
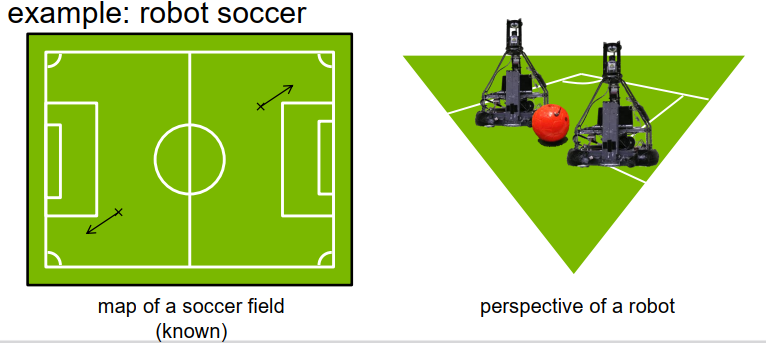
Chapter 5 Tracking Moving Objects 追踪移动物体 欢迎来到《汽车视觉》课程中关于跟踪运动物体的第五章。在本章中,我们将讨论如何利用相机、激光雷达传感器或其他环境传感器来估计场景中物体的运动。与像素级方法不同,我们将把注意力转移到物体级别上。这意味着我们假设环境中的物 …

深度学习 Deep Learning 多层感知器Multi-Layer Perceptrons (MLP) MLP 是高度参数化的非线性函数 示例:图像分类 $\vec{x}$ 特征向量,例如 图像中所有灰度值的向量 $\vec{y}$ 1-of-q-vector 为 q 个可能类别中的每一个建模概 …
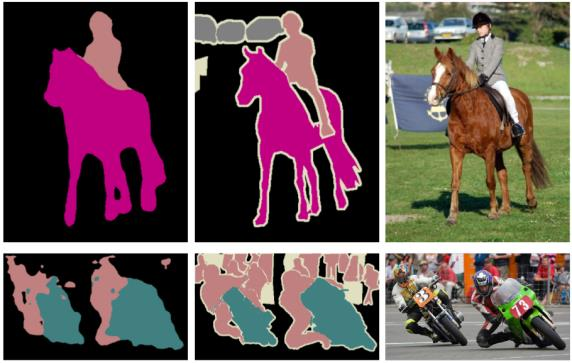
深度学习 语义分割和目标检测 (Semantic Segmentation and Object Detection) 场景标注 Scene Labeling 分割图像 分类每个像素 自动编码器/解码器结构 摘自:J. Long、E. Shelhamer、T. Darrell,“用于语义分割的全卷积 …
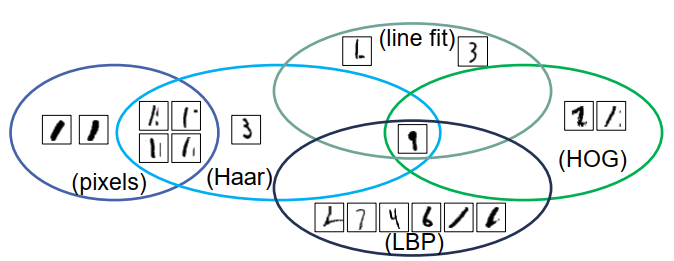
模式识别 组合方法 Ensemble Methods 如果想解决分类问题,应该怎么做? – 创建专家:训练分类器 – 训练几个分类器 → 并构建一个组合 集成学习归属于机器学习,他是一种「训练思路」,并不是某种具体的方法或者算法。 现实生活中,大家都知道「人多力量大」,「3 个臭皮匠顶个诸葛亮」。而 …
形态学运算 Morphological Operations 对于图像具有的问题:孔洞, 参差不齐的轮廓,间隙,微小区域等,我们提出了形态学运算。 两个关键概念:扩展和缩小区域: ——腐蚀erosion: 将区域缩小一个像素 ——膨胀dilation:将区域扩大一个像素 最基本的形态学运算是膨胀和腐 …
模式识别 Pattern Recognition 分类:将对象分配到类别(classes)。 维基百科: 模式识别,就是通过计算机用数学技术方法来研究模式的自动处理和判读。我们把环境和客体统称为“模式”。随着计算机技术的发展,人类有可能研究复杂的信息处理过程。 信息处理过程的一个重要形式是生命体对环 …
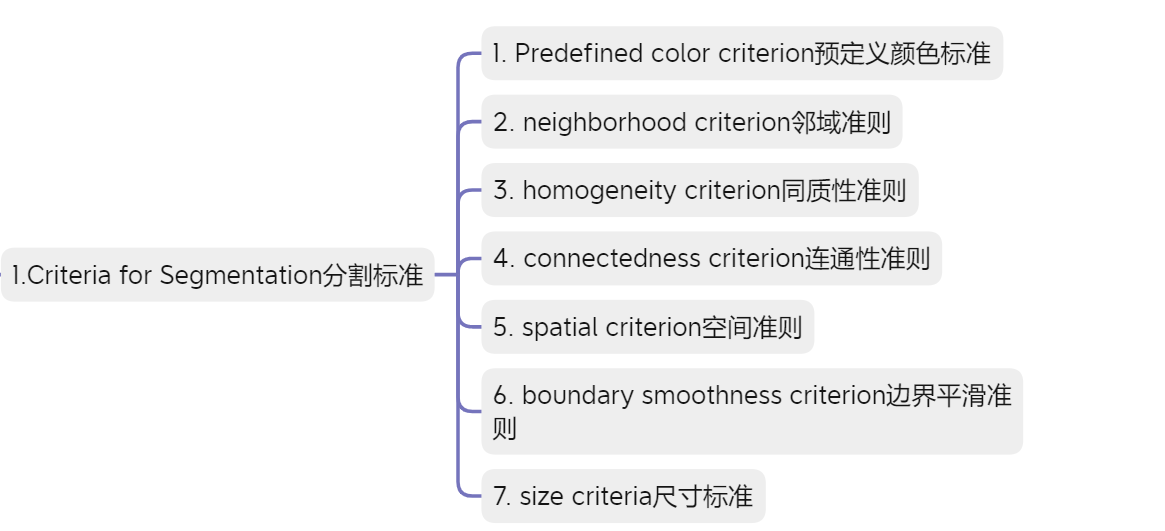
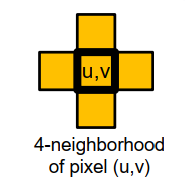
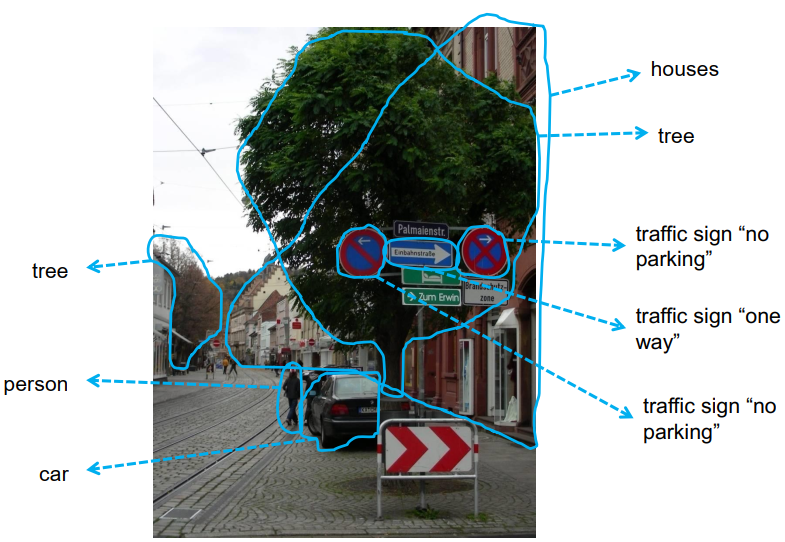
机器视觉-图像分割(第一部分) 在计算机视觉领域, 图像分割 (segmentation)指的是将数字图像细分为多个图像子区域(像素的集合)(也被称作超像素)的过程。图像分割的目的是简化或改变图像的表示形式,使得图像更容易理解和分析。图像分割通常用于定位图像中的物体和边界(线,曲线等)。更精确的,图 …
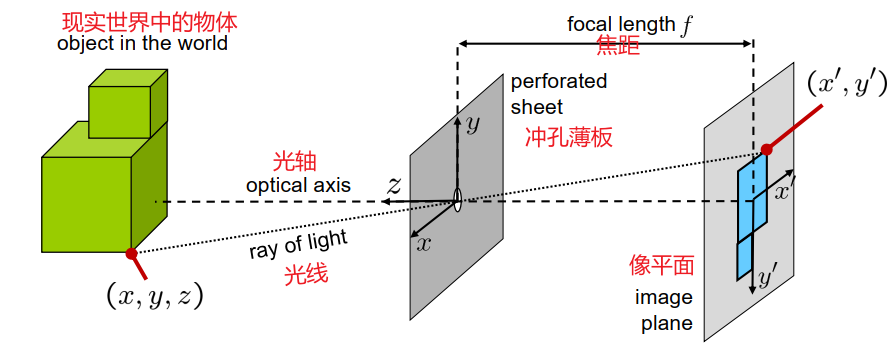
针孔照相机 点 $$(x,y,z)$$投影到 $$(x',y')$$截距定理: $$\frac{x}{z}=\frac{x^{\prime}}{f}, \quad \frac{y}{z}=\frac{y^{\prime}}{f} \quad \Rightarrow \quad z …
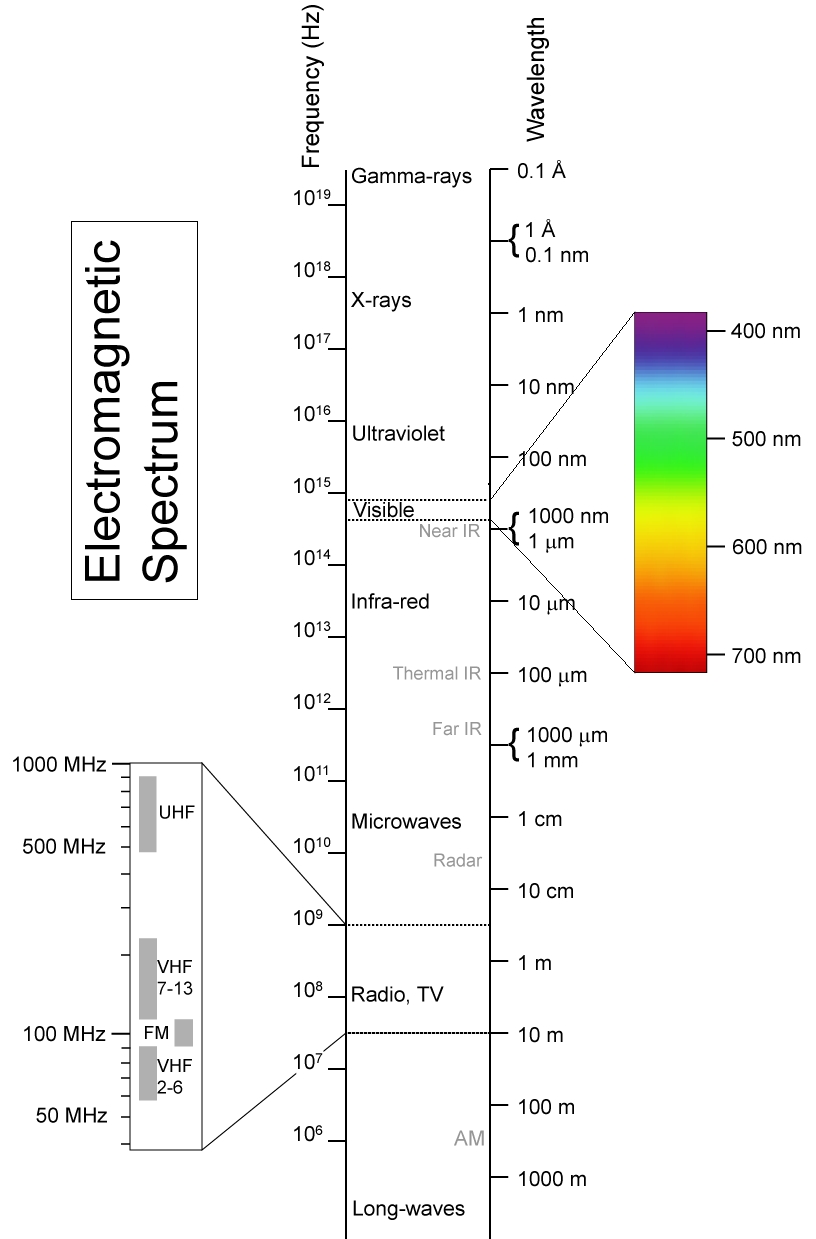
颜色 颜色物理学 可见光是波长在 380nm 到 740nm 之间的电磁波 光的波长指定了它的颜色图像 – 光可以包含许多波长’ → 光谱 – 光谱取决于光源和滤光片 – 要完整描述光源的物理特性,我们必须知道它的全光谱 人类感知中的颜色 人眼有四种感光细胞: 视杆细胞(对颜色不敏感) rods …
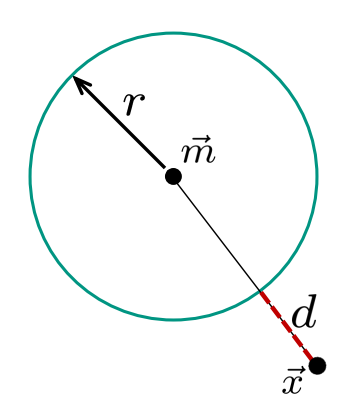
曲线拟合——圆和椭圆 在上一篇文章中,我们总结了视觉识别中对于直线型边缘的拟合。但是如果有的图形边缘是曲线的话应该怎么拟合? 这一篇博文,我们就对其进行讨论。 标准圆 首先圆的方程为: $$\left(x-m_{1}\right)^{2}+\left(y-m_{2}\right)^{2}-r^{2} …
曲线拟合(直线部分) Curve Fitting
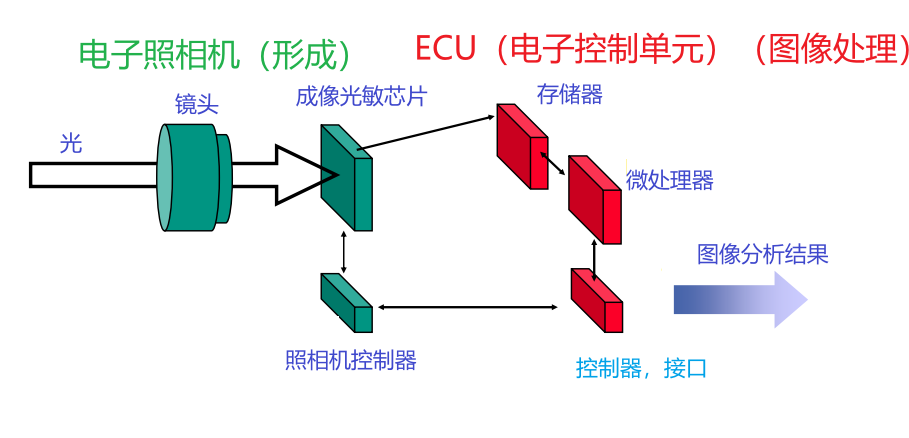
图像预处理 Image Preprocessing 图像形成与分析 成像器 图像形成过程: 入射光强度 成像仪的输出 图像形成过程: – 采样sampling 评估规则网格上的光强度 – 量化 quantization 将连续信号映射到离散值(自然数) – 模糊和噪声 blur and noise …
边缘检测 Edge Detection